Research
The following are projects mostly from my time at the Boston Dynamics AI Institute .
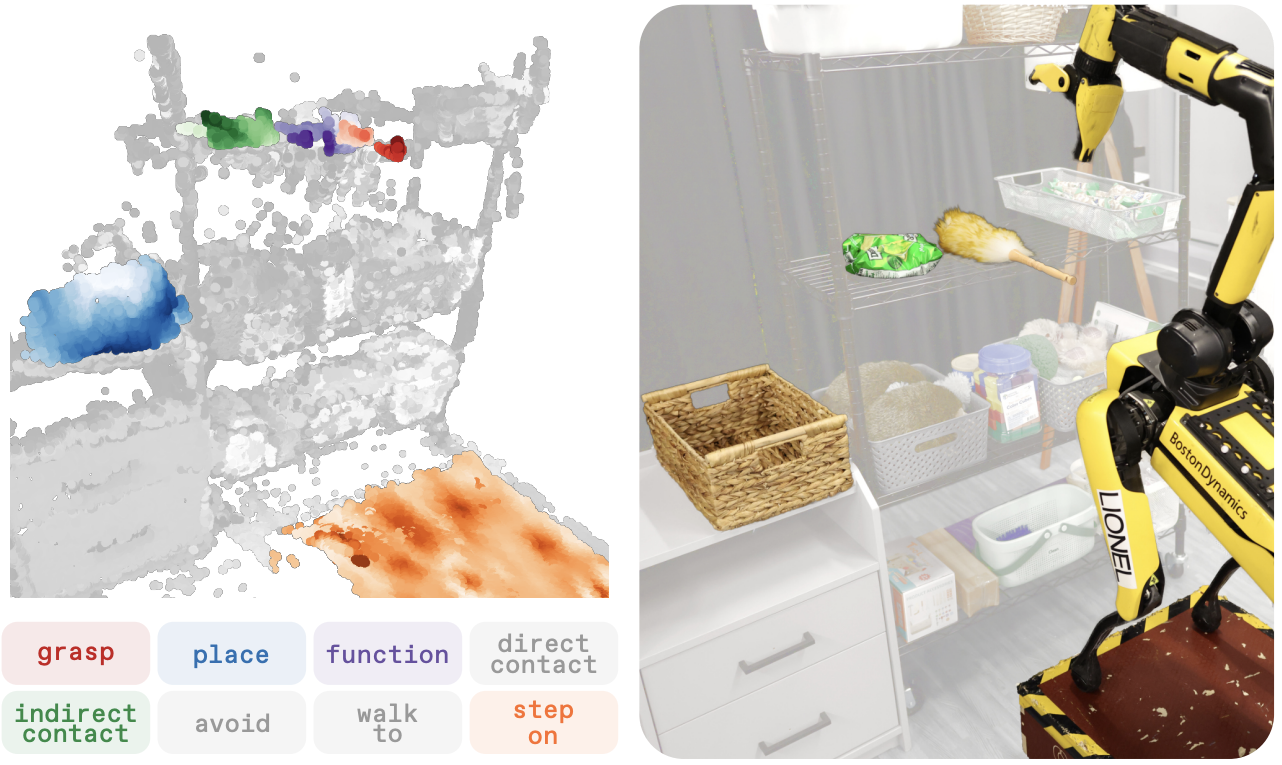
SAGA: Open-World Mobile Manipulation via Structured Affordance Grounding
IEEE Robotics and Automation Letters, 2026
CuriousBot: Interactive Mobile Exploration via Actionable 3D Relational Object Graph
IEEE Robotics and Automation Letters, vol. 11, no. 4, pp. 4993-5000, April 2026.
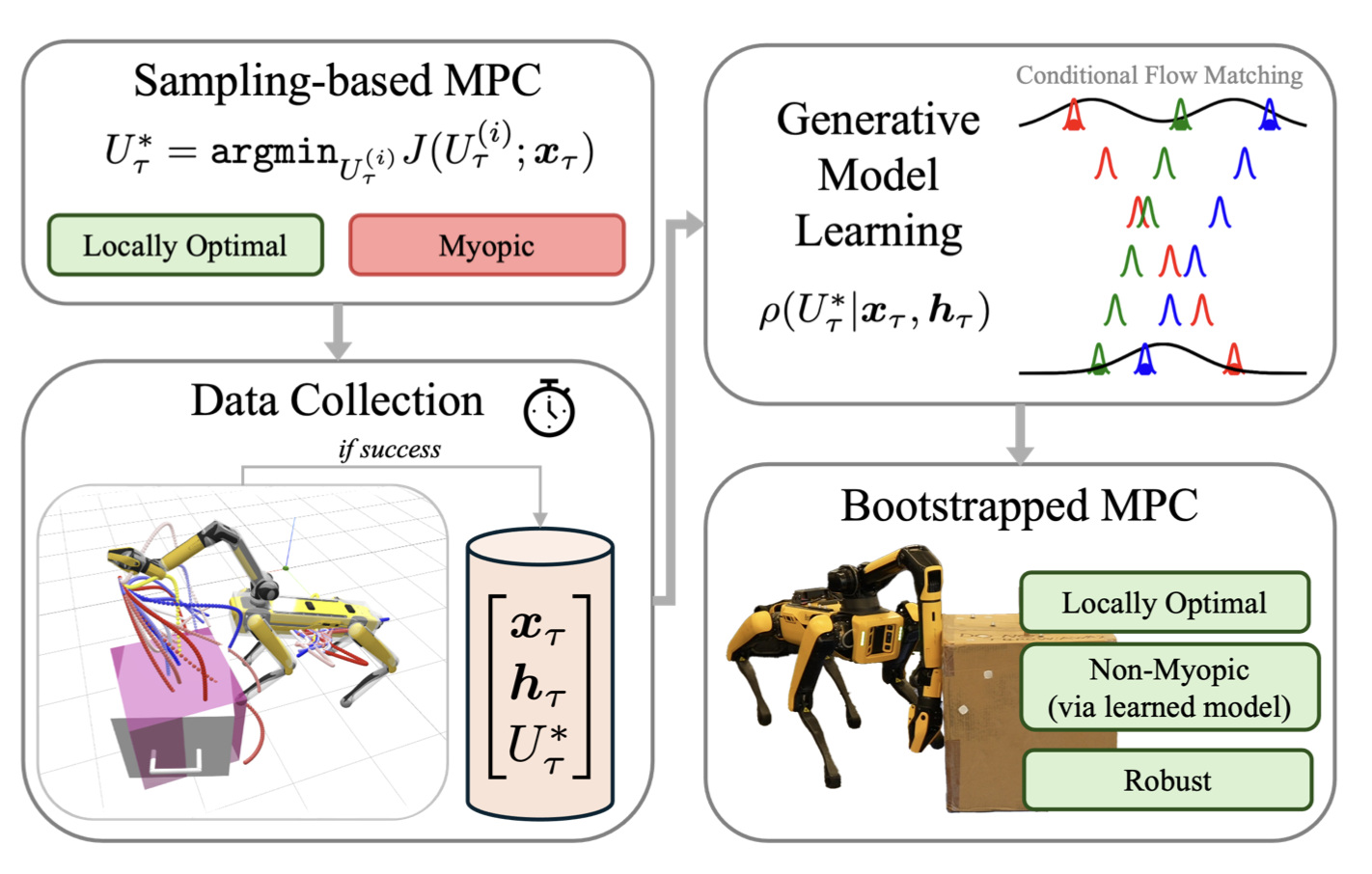
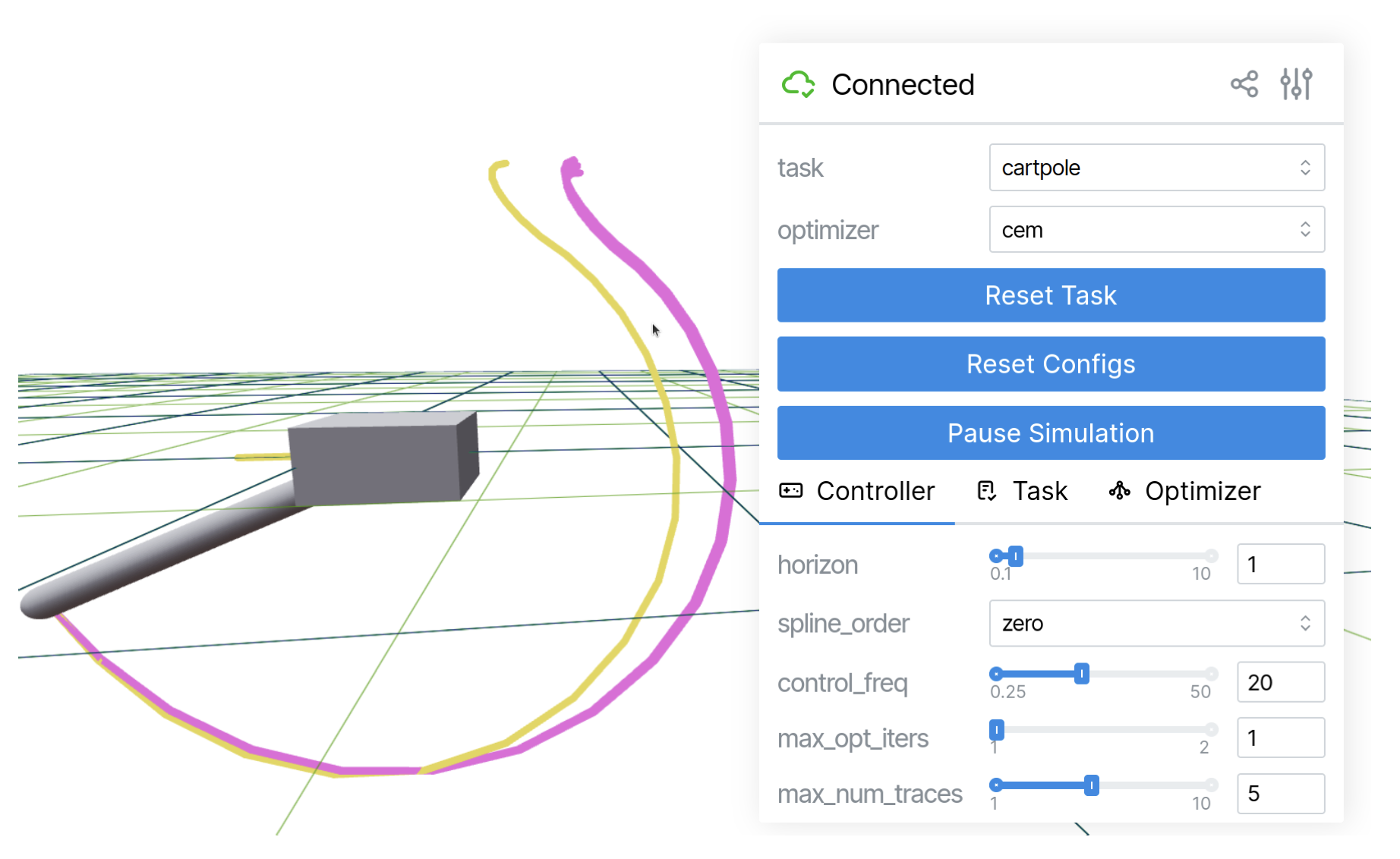
Generative Models From and for Sampling-Based MPC: A Bootstrapped Approach for Adaptive
Contact-Rich Manipulation
IEEE Robotics and Automation Letters, vol. 11, no. 3, pp. 3478-3485, 2026
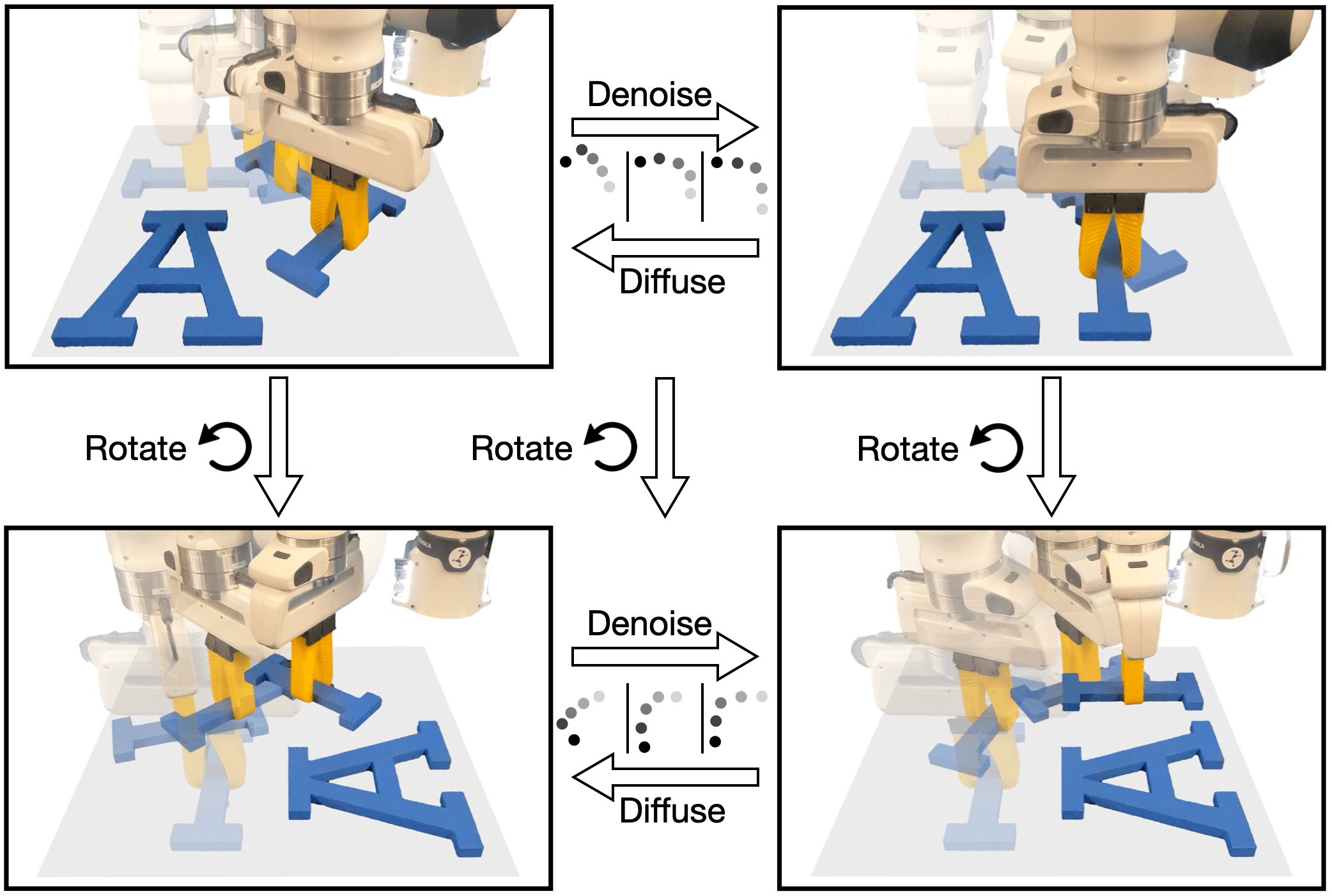
Planning-Guided Diffusion Policy Learning for Generalizable Contact-Rich Bimanual
Manipulation
IEEE International Conference on Robotics and Automation (ICRA), 2026
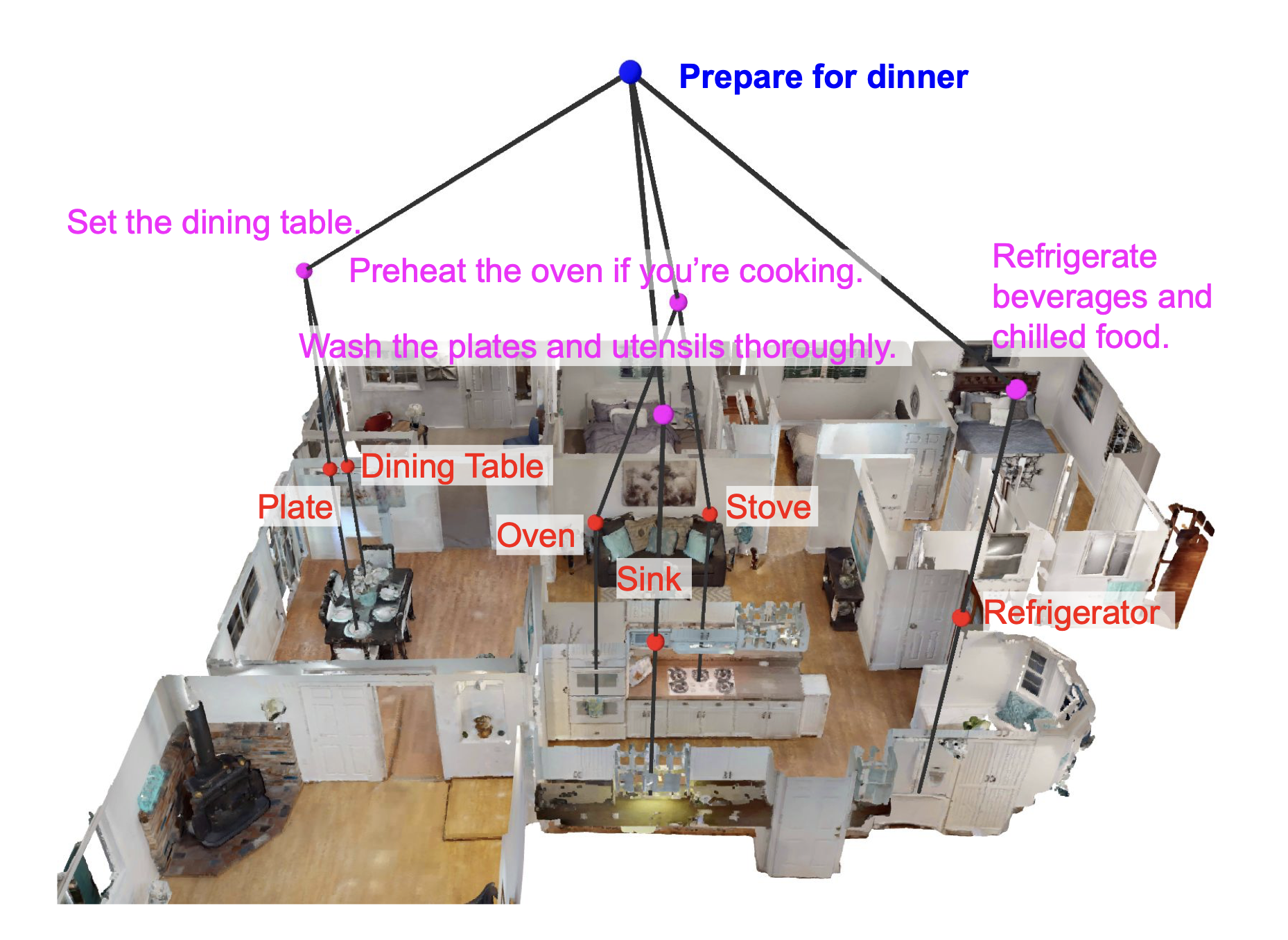
ASHiTA: Automatic Scene-grounded HIerarchical Task Analysis
IEEE/CVF Computer Vision and Pattern Recognition Conference (CVPR), 2025
Physics-Driven Data Generation for Contact-Rich Manipulation via Trajectory Optimization
Robotics: Science and Systems (RSS), 2025

Should We Learn Contact-Rich Manipulation Policies from Sampling-Based Planners?
IEEE Robotics and Automation Letters, vol. 10, no. 6, pp. 6248-6255, June 2025.
2025 IEEE Robotics and Automation Letters Best Paper Award
Is Linear Feedback on Smoothed Dynamics Sufficient for Stabilizing Contact-Rich Plans?
IEEE International Conference on Robotics and Automation (ICRA), 2025